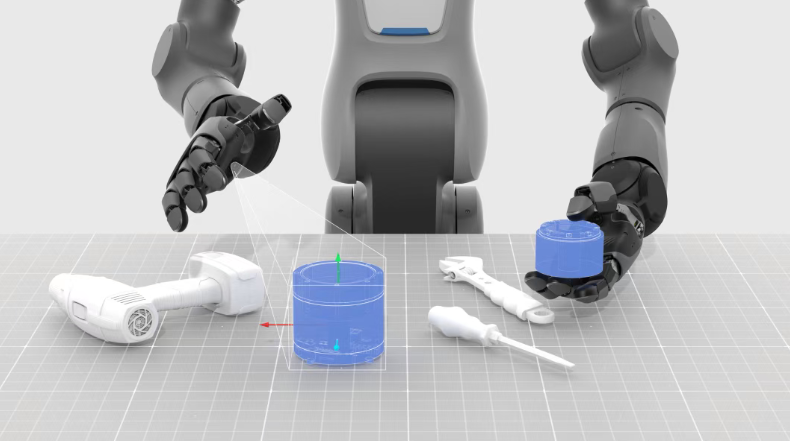
In the past, it was considered amazing for a robot to be able to run and jump; now, the real skill is to be able to steadily pick up a screw and gently fold a shirt.
As embodied intelligence moves from “walking” to “working,” the biggest obstacle between ideal and reality is no longer chip computing power, but rather the end effectors that can truly “shake hands” with the physical world. Dexterous hands (and bionic hands) are rapidly transforming from sophisticated teaching tools in laboratories into core engines for industrial application.
The choice of technological path is returning to pragmatism. Early on, the industry was obsessed with making it “as human-like as possible,” and five-fingered bionics became the standard. But reality quickly offered a better solution:
Pacini proactively eliminated its little finger, using a four-finger solution to cover 85% of industrial scenarios, reducing hardware costs by 20%; Sunday Robotics’ three-finger design targets 80% of household chores, using fewer joints to achieve higher reliability.
This is not a compromise, but a precise trade-off. In terms of underlying transmission technology, the industry has also figured out the characteristics of each: chord drives are like human tendons, flexible but prone to fatigue and loosening; direct drive motors have precise force and zero backlash, but heat generation and size are major drawbacks; linkage structures are sturdy and durable, but sacrifice the flexibility of the joints.
Today, leading manufacturers are no longer “betting” on a single solution, but rather modularly assembling it to create a system that adapts to scientific research, factory assembly, and light-duty scenarios. Dexterous hands are no longer focused on “looking like a human,” but rather on “doing things beautifully.”
More noteworthy is that dexterous hands have evolved from “execution components” to “data entry points.” Xiaomi and several startups have simultaneously launched isomorphic “haptic gloves”: when a person wears them to work, data such as fingertip pressure, grasping angle, and sliding friction are synchronized in real time, allowing the robot to directly “copy the work.” This “human-teacher-machine” model significantly bypasses the trial-and-error costs of traditional reinforcement learning, exponentially shortening the algorithm training cycle.
Meanwhile, the industrial chain is experiencing a dual recovery in manufacturing and capital. From Zhaowei Electromechanical’s highly integrated micro motors to Lingxin Qiaoshou achieving a monthly production of thousands of units and covering all technical routes, and Yinshi Robotics’ self-developed micro servo electric cylinders connecting upstream and downstream, the domestic supply chain is pushing down the price of what were once “luxury goods” costing hundreds of thousands of yuan to the thousands or even hundreds of yuan level. When the cost curve and the data flywheel form a positive cycle, the large-scale popularization of dexterous hands is only a matter of time.
Imagine this morning: before you’re fully awake, a robot in the kitchen has already steadily cracked an egg with three fingers, while its other flexible hand gently pushes warm milk towards you. This isn’t science fiction; it’s the everyday reality that’s about to become a reality after dexterity robots have broken the thousand-yuan mark in cost and crossed the critical reliability barrier.
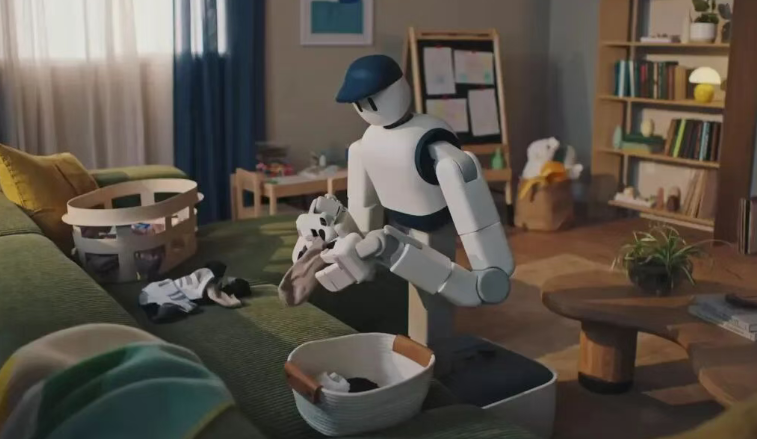
For consumers, the true significance of dexterous hands lies not in making robots “look like humans,” but in enabling robots to “truly do work for humans.” In the past, most home robots were limited to sweeping and playing music, essentially “smart speakers with wheels.”
A pair of dexterous hands capable of precise force control and material perception will completely streamline the final step of housework: it can distinguish the washing intensity of silk from wool, locate medicines deep in drawers without looking, and provide just the right amount of assistance when the elderly get up. Home service will shift from “standardized instructions” to “personalized companionship,” and robots will no longer be cold executors, but rather considerate and understanding life collaborators.
Of course, the road to widespread adoption is not smooth. First and foremost is safety: the robotic fingers come into direct contact with the human body, requiring a medical-grade margin of error. Secondly, privacy is paramount; frequent physical interactions will record a vast amount of family habits, and the anonymization and attribution of this data urgently need to be standardized. Finally, there’s the psychological barrier: whether users can truly trust a machine that “touches you” still requires time and experience to refine. However, the direction of technological evolution is irreversible. When the dexterous hand moves from the industrial production line to the living room dining table, the human-machine relationship will undergo a quiet but profound transformation.
We no longer need to adapt to the logic of machines; instead, machines will learn to adapt to human habits. For ordinary families, this might mean dual-income parents can spend an extra hour with their children, elderly people living alone can receive more peace of mind , and weary city dwellers can have more uninterrupted time without being interrupted by trivial matters. After all, the essence of technology has always been to serve humanity.
Leave a Reply